
Torque, power, and cooling, Auto News, ET Auto
By Dr. -Ing. Praveen Kumar
The second article in this series discussed the underlying principles common to all motors. As we have seen, all the motors produce either interaction torque, reluctance torque or a combination of both. From the vehicle’s perspective, the type of torque that the motor produces is irrelevant. The important issue is the Torque versus Speed (T vs N) curve. A typical T vs N curve that a traction motor used in EVs must have is shown in Figure 1.
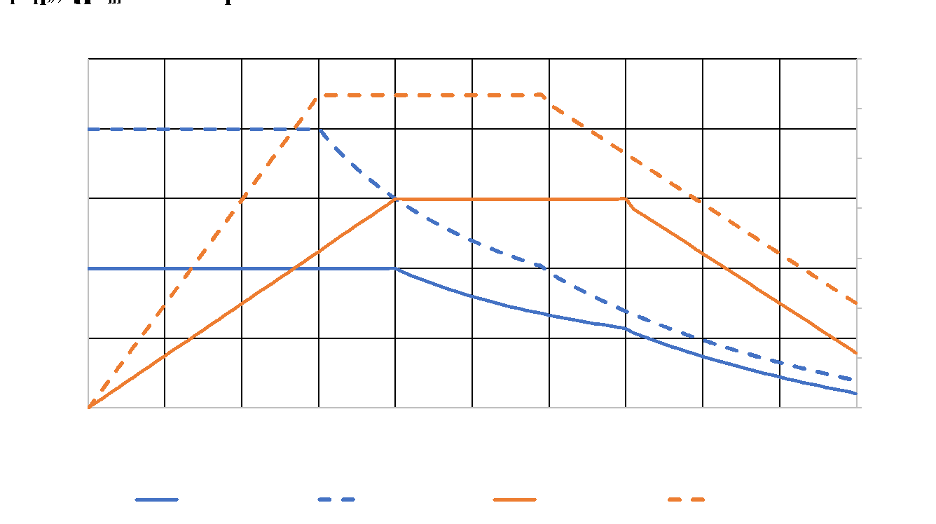
One unique characteristic of motors is that they can be overloaded, i.e., they can deliver more power/torque than they are designed for, albeit for a short duration. The overload capability of a motor reflects its ultimate output performance and is very important in transportation applications because it determines the instantaneous acceleration ability. The magnitude and duration of the overload capacity of motors are limited, first, by its stalling or breakdown torque and, second, by its operating temperature.
The breakdown torque of the motor is analogous to the stalling torque of an internal combustion engine. When the motor works in an overload condition, the electromagnetic parameters change drastically, resulting in magnetic saturation and huge loss Ohmic and Core losses. When the motor is overloaded, the output torque is quickly saturated, i.e., for example, the rated current may go to 3 times the rated value, and the output torque increases by factor 2.
This is because the stator core of the motor reaches saturation, and the air gap magnetic density is reduced due to the nonlinearity of the magnetic circuit. To understand this phenomenon, let us look at Figure 2, which shows the current corresponding to the Torque values shown in Figure 1. Through Figure 2, we observe that the increase in current is greater than the increase in torque, indicating that the torque does not scale linearly with the current.
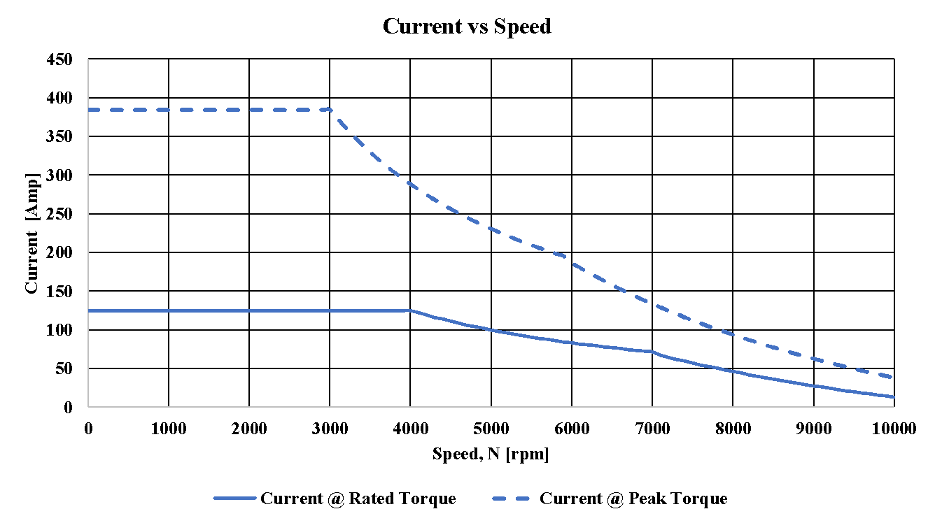
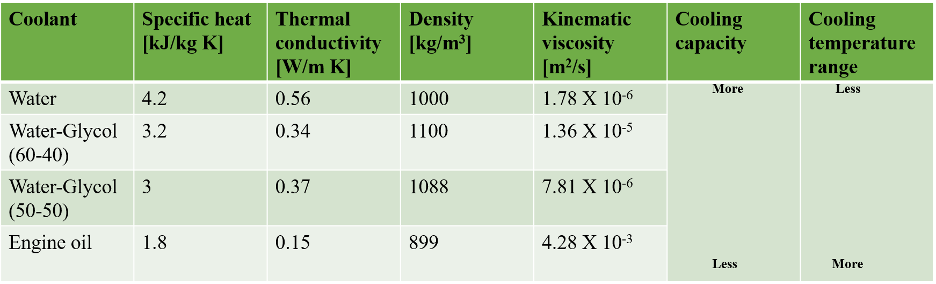
It is evident that a high current is needed to overload the motor resulting in more Ohmic (or copper losses). The higher Ohmic losses result in a temperature rise in the winding of the motor. As the temperature of the winding increases, the copper resistance further increases resulting in a decrease in efficiency with every increase in the operating temperature. In a typical case of a motor with 90% full-load efficiency at 75 degrees centigrade, the efficiency will be reduced by 0.5% by an increase to 105 degrees centigrade copper temperature or by 1.25% if the temperature is raised to 150 degrees centigrade. Such an increase in the losses further raises the temperature, causing cumulative heating, or “temperature creep”. The motor’s overloading must be carefully included in the motor design phase, and detailed attention must be paid to the cooling technique and coolant used.The maximum heat is generated in the stator of the motors, and stator cooling should be done carefully. Stator cooling takes convection into consideration to cool either the rear of the stator, a process known as direct cooling, or cooling the housing. Direct cooling designs vary in the shape of ducts and flow rate, but it also varies in terms of their path, axial or helical cooling. However, it is important to note that most of the automotive industry currently uses helical, yet axial cooling is still being equally researched and developed. The schematic of the two cooling systems is shown in Figure 3. Furthermore, the effectiveness of the cooling system depends on the coolant used. The properties of various coolants used in motors are summarized in Table 1.
In this article, we discussed the characteristics curves of the overloading issues of the motor. In the next article, we will dwell deeper into the characteristics curves and analyse them from the design point of view.
In conclusion, this article has delved deeper into the unique characteristics of electric motors and highlighted their overload capability, which determines their ultimate output performance.
(Dr. -Ing. Praveen Kumar is Professor, Department of Electronics and Electrical Engineering, IIT Guwahati. Views are personal.)

By Dr. -Ing. Praveen Kumar
The second article in this series discussed the underlying principles common to all motors. As we have seen, all the motors produce either interaction torque, reluctance torque or a combination of both. From the vehicle’s perspective, the type of torque that the motor produces is irrelevant. The important issue is the Torque versus Speed (T vs N) curve. A typical T vs N curve that a traction motor used in EVs must have is shown in Figure 1.
One unique characteristic of motors is that they can be overloaded, i.e., they can deliver more power/torque than they are designed for, albeit for a short duration. The overload capability of a motor reflects its ultimate output performance and is very important in transportation applications because it determines the instantaneous acceleration ability. The magnitude and duration of the overload capacity of motors are limited, first, by its stalling or breakdown torque and, second, by its operating temperature.
The breakdown torque of the motor is analogous to the stalling torque of an internal combustion engine. When the motor works in an overload condition, the electromagnetic parameters change drastically, resulting in magnetic saturation and huge loss Ohmic and Core losses. When the motor is overloaded, the output torque is quickly saturated, i.e., for example, the rated current may go to 3 times the rated value, and the output torque increases by factor 2.
This is because the stator core of the motor reaches saturation, and the air gap magnetic density is reduced due to the nonlinearity of the magnetic circuit. To understand this phenomenon, let us look at Figure 2, which shows the current corresponding to the Torque values shown in Figure 1. Through Figure 2, we observe that the increase in current is greater than the increase in torque, indicating that the torque does not scale linearly with the current.
It is evident that a high current is needed to overload the motor resulting in more Ohmic (or copper losses). The higher Ohmic losses result in a temperature rise in the winding of the motor. As the temperature of the winding increases, the copper resistance further increases resulting in a decrease in efficiency with every increase in the operating temperature. In a typical case of a motor with 90% full-load efficiency at 75 degrees centigrade, the efficiency will be reduced by 0.5% by an increase to 105 degrees centigrade copper temperature or by 1.25% if the temperature is raised to 150 degrees centigrade. Such an increase in the losses further raises the temperature, causing cumulative heating, or “temperature creep”. The motor’s overloading must be carefully included in the motor design phase, and detailed attention must be paid to the cooling technique and coolant used.The maximum heat is generated in the stator of the motors, and stator cooling should be done carefully. Stator cooling takes convection into consideration to cool either the rear of the stator, a process known as direct cooling, or cooling the housing. Direct cooling designs vary in the shape of ducts and flow rate, but it also varies in terms of their path, axial or helical cooling. However, it is important to note that most of the automotive industry currently uses helical, yet axial cooling is still being equally researched and developed. The schematic of the two cooling systems is shown in Figure 3. Furthermore, the effectiveness of the cooling system depends on the coolant used. The properties of various coolants used in motors are summarized in Table 1.
In this article, we discussed the characteristics curves of the overloading issues of the motor. In the next article, we will dwell deeper into the characteristics curves and analyse them from the design point of view.
In conclusion, this article has delved deeper into the unique characteristics of electric motors and highlighted their overload capability, which determines their ultimate output performance.
(Dr. -Ing. Praveen Kumar is Professor, Department of Electronics and Electrical Engineering, IIT Guwahati. Views are personal.)
Denial of responsibility! Techno Blender is an automatic aggregator of the all world’s media. In each content, the hyperlink to the primary source is specified. All trademarks belong to their rightful owners, all materials to their authors. If you are the owner of the content and do not want us to publish your materials, please contact us by email – [email protected]. The content will be deleted within 24 hours.